

Students Build Innovative Object Following Robot Project
Students create an innovative object following robot project using Arduino, a hands-on science experiment for research and learning.
Arduino Based Object Following Robot Kit
Ready to build and demonstrate an autonomous follower robot? Buy the Object Following Robot Kit from Bigyan Project (বিজ্ঞান প্রজেক্ট).
The Arduino Based Object Following Robot Kit is a hands-on learning package designed to teach practical robotics, embedded systems, and automation. Using an Arduino Uno, ultrasonic distance sensing, and IR modules, the robot detects a target object and autonomously follows it while avoiding collisions. The included 4-wheel chassis and L293D motor shield deliver smooth, controllable motion, while a micro servo positions the ultrasonic sensor to scan the environment. This kit is ideal for science fairs, classroom demonstrations, engineering labs, and hobby projects. Curated by Bigyan Project (বিজ্ঞান প্রজেক্ট), the set arrives with carefully selected components so learners can focus on coding, wiring, and testing rather than sourcing parts.
Product Specifications
| Microcontroller Board | Arduino Uno R3 (ATmega328P) |
|---|---|
| Motor Driver | L293D Motor Shield (dual-channel DC control, PWM speed control) |
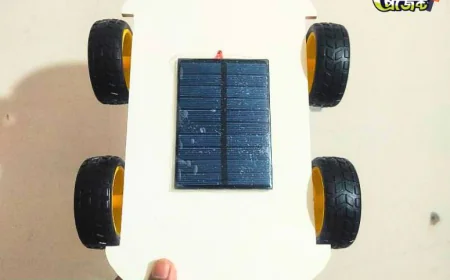
| Chassis | 4-Wheel Robot Chassis Kit with DC gear motors and wheels |
| Primary Sensing | HC-SR04 Ultrasonic Distance Sensor (typical range 2–400 cm) |
| Supplementary Sensing | IR Sensor Module FC-51 (2 pcs) for near-field detection / edge sensing |
| Sensor Positioning | SG90 Micro Servo (approx. 180° sweep) |
| Power Supply | 2× 18650 Li-ion cells (in 2-slot holder) with wiring leads |
| Cabling | Assorted male–female jumper wires |
| Recommended Input Voltage | 7–12 V DC to VIN (verify with your power path); logic level 5 V |
| Typical Build Time | 1–2 hours for mechanical assembly; 30–60 minutes for wiring and testing |
| Skill Level | Beginner to Intermediate (basic Arduino coding and wiring recommended) |
| Included Guide | Online wiring map and sample Arduino sketch (download from product page) |
| Shop Link | bigyanproject.com/en/object-follower/object-following-robot-arduino |
Features
- Autonomous object following using ultrasonic ranging with real-time speed and direction control
- Swept sensing via SG90 servo to widen the field of view for robust target tracking
- Dual IR modules for close-range detection, edge sensing, or supplemental obstacle avoidance
- Plug-and-play L293D motor shield with stackable Arduino form factor
- Durable 4-wheel chassis for stable motion and higher payload headroom
- Beginner-friendly wiring with jumper cables and straightforward connections
- Open-source Arduino code base for easy customization and learning
- Education-focused selection by Bigyan Project for reliable classroom performance
- Expandable with additional sensors such as line sensors, IMU, or Bluetooth control
- Ideal for demonstrations, competitions, and rapid prototyping in STEM programs
Applications / Use Cases
- School and college science exhibitions with live robotics demonstrations
- Introductory robotics coursework covering sensing, control, and actuation
- STEM clubs and makerspaces building autonomous mobile robots
- Prototyping human-following carts or showcase security patrolling concepts
- Research experiments on ultrasonic tracking, sensor fusion, and motion control
User Guide / How to Use
- Assemble the chassis by mounting the DC gear motors and wheels, then fix the top plate according to the chassis guide.
- Attach the SG90 servo to the sensor bracket and mount the HC-SR04 on the servo horn so the sensor can pan left and right.
- Stack the L293D motor shield onto the Arduino Uno. Connect left and right motors to the shield outputs per the silk labels.
- Wire the HC-SR04 trigger and echo pins to the defined Arduino digital pins, and connect VCC and GND correctly.
- Connect the two FC-51 IR sensors to 5 V, GND, and digital inputs for near-field detection or edge protection.
- Place two 18650 cells into the battery holder. Route power through a safe path suitable for your shield and board. Verify polarity before powering.
- Upload the provided Arduino sketch from the product page. Adjust distance thresholds, servo sweep angles, and speed parameters in code comments.
- Test on an open floor. Present a target object at 20–80 cm. The robot should align its heading and follow smoothly.
- Fine-tune proportional responses, minimum follow distance, and maximum servo sweep speed for your environment.
- Document your build steps and results for science fair display boards and classroom reports.
Frequently Asked Questions (FAQs)
- Q: Does the kit include all parts needed to run the robot out of the box?
A: Core electronics and chassis are included. You will need basic tools and a USB cable for programming. Check the product page on Bigyan Project for the latest inclusions. - Q: Can beginners use this kit without prior experience?
A: Yes. The wiring is straightforward and the example code is well commented. Basic familiarity with Arduino IDE helps. - Q: How does the robot follow an object accurately?
A: The ultrasonic sensor measures distance while the servo scans to find the direction of the nearest target. The code adjusts motor speeds to minimize the distance error. - Q: What battery life should I expect with two 18650 cells?
A: Runtime depends on motor load and cell capacity. Typical classroom demos range from 30 to 90 minutes on quality cells. - Q: Can I add Bluetooth or Wi-Fi control later?
A: Yes. You can integrate HC-05 Bluetooth or ESP-01 modules and modify the sketch to support manual override or telemetry. - Q: Is the code customizable for line following or obstacle avoidance only?
A: Yes. You can repurpose the IR sensors for line-following or enhance avoidance by adjusting thresholds and behaviors in the sketch. - Q: What is the ideal target distance for following?
A: Start with 20–50 cm as a safe zone and tune the setpoint and proportional gains in code for your environment. - Q: Where can I buy replacement parts locally?
A: Replacement components and upgrades are available from Bigyan Project (বিজ্ঞান প্রজেক্ট). Visit the product page for links.
Challenges and Considerations
- Ultrasonic sensors can be affected by soft or angled surfaces that scatter sound
- Bright sunlight and reflective floors may influence IR module readings
- Battery voltage sag at high load can reduce speed and sensor reliability
- Servo jitter may appear if power rails are not adequately decoupled
- Mechanical alignment of the sensor bracket is critical for accurate tracking
- Calibrate thresholds and gains for each environment to maintain stable following
Compatibility
- Compatible with Arduino IDE on Windows, macOS, and Linux
- Works with common Arduino libraries for HC-SR04, servo control, and motor drivers
- Expandable with Bluetooth HC-05, ESP-01, or NRF24L01 modules
- Supports additional sensors such as line trackers, IMU, and encoders with code changes
- Mechanical compatibility with most standard two-plate 4WD chassis kits
Future Enhancement Options
- Add PID control for smoother distance regulation and turning response
- Implement sensor fusion combining ultrasonic and IR data for stability
- Integrate wheel encoders for odometry and more precise motion
- Upgrade to rechargeable power management with protected 18650 cells
- Enable Bluetooth app control or Wi-Fi telemetry dashboard
- Adopt a 3D-printed pan-tilt mount for dual-sensor arrays
- Migrate to ESP32 for integrated Wi-Fi, Bluetooth, and faster processing
Benefits
- Hands-on understanding of sensing, actuation, and closed-loop control
- Clear learning outcomes aligned with STEM and robotics curricula
- Open-source and customizable code for deeper experimentation
- Robust parts selection optimized by Bigyan Project for classroom use
- Demonstration-ready build that attracts attention at fairs and competitions
- Expandable platform for long-term learning and iterative projects
Build, code, and demonstrate your own autonomous follower robot today. For pricing, stock, and downloads, visit Bigyan Project (বিজ্ঞান প্রজেক্ট) – Object Following Robot Kit.
Intro / Lead Paragraph
A group of students from Bigyan Project (বিজ্ঞান প্রজেক্ট) have developed an innovative object following robot using Arduino. The project demonstrates autonomous movement and real-time sensing, aiming to enhance hands-on learning in robotics and automation. The experiment was conducted in a classroom setting and is now showcased for student science projects and exhibitions.
Background Context
Robotics education is becoming essential in STEM curricula, yet many students struggle with practical applications of automation and sensor integration. Current robotics kits often focus on basic line-following or manual control. This Arduino-based object following robot fills the gap by combining ultrasonic and IR sensors for real-time object detection, making autonomous navigation accessible for students.
Project Details
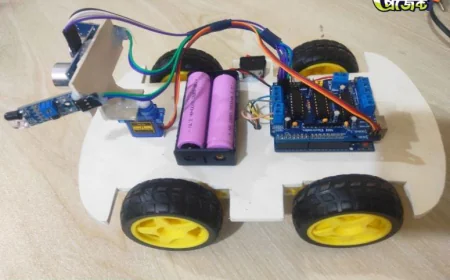
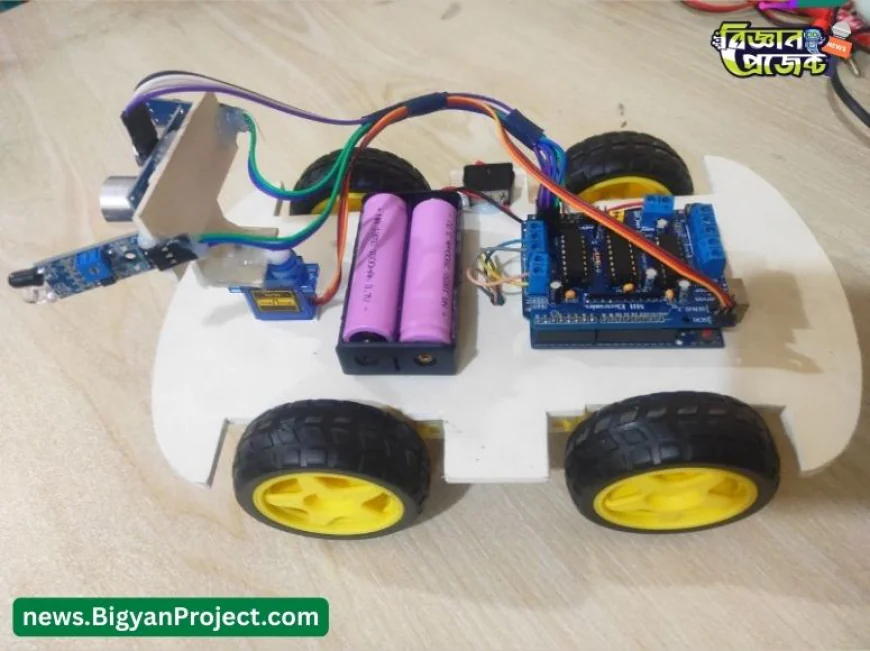
The students assembled a 4-wheel chassis powered by DC motors and controlled via an Arduino Uno R3 and L293D motor shield. An HC-SR04 ultrasonic sensor mounted on an SG90 servo detects objects, while two IR modules provide additional near-field sensing. The robot adjusts its speed and direction autonomously to follow a target object.
According to one of the students involved, “We wanted to create a hands-on project that demonstrates real-time object tracking and automation. It allowed us to learn Arduino coding, sensor integration, and motor control practically.”
Research / Innovation Angle
This project is unique because it integrates multiple sensors for dynamic object following in a compact, low-cost kit suitable for students. It is part of a larger initiative at Bigyan Project to promote STEM-based innovation and student-led robotics research. The experiment also provides data on sensor accuracy and response times, useful for further development in autonomous robotics.
Impact and Applications
The robot can be applied in educational settings, STEM workshops, and science exhibitions to demonstrate autonomous movement and sensor-based tracking. It encourages innovation among students and helps build practical skills for future robotics projects. In the long term, similar technology can be adapted for industrial automation, warehouse robotics, and autonomous delivery systems.
Quotes & Voices
- Student: “Building this robot gave us confidence to explore more advanced robotics projects and automation experiments.”
- Teacher/Mentor: “This project highlights the creativity and technical skills of our students, integrating sensors and programming effectively.”
- Industry Expert: “Hands-on projects like this prepare students for real-world applications of robotics and autonomous systems.”
Conclusion
The Arduino-based object following robot project showcases the potential of student innovation in STEM education. With future enhancements such as PID control, sensor fusion, and wireless connectivity, this project can evolve into a sophisticated autonomous system. It serves as an inspirational example for young innovators and encourages further research and experimentation in robotics.
What's Your Reaction?
 Like
2
Like
2
 Dislike
0
Dislike
0
 Love
2
Love
2
 Funny
0
Funny
0
 Angry
0
Angry
0
 Sad
0
Sad
0
 Wow
2
Wow
2








